
发布时间:2025-06-29
起源-梦想不会被冻结
近年来,世界各国围绕核心技术的控制与反控制、争夺与反争夺,几乎每天都在演出一幕幕激烈、残酷的没有硝烟的战争。在工业4.0的大背景下,工业机器人被认为是智能制造的重要基石。但我国工业机器人企业面临着专利少、核心专利缺失的困境,与高歌猛进的下游应用市场形成巨大的反差。 由于长期以来在核心技术方面的滞后,我国工业机器人产业依然存在着不少的短板,控制器作为核心部件被国外垄断,我国在核心技术与美、日、德等国家差距明显。因此企业拥有自主核心技术才能获得快速稳定的发展。这是所有机器人领域从业者的一个梦想,也是一个长时间的追求。 开元,木机器人作为技术创新型企业,自成立以来持续投入自主控制系统的研发。我们需要做一款属于我们自己的控制器-AtomMotion。
PART 01-示教器篇需要
大显示屏,
最大化的显示机器人操作的相关信息;
能够保证安全的按键操作。
它是我们理想的状态
.png)
(示教器)
一切尽在掌握中:10.1寸触摸屏设计,最大化显示机器人操作的相关信息。物理急停和使能按键设计,更大限度的保护操作工程师的安全。轻量化的选材,为操作工程师提供更体贴的关怀。符合实际应用场景的操作界面,最大限度的解放工程师的双手。
PART 02-控制器篇
需要
高性能处理器,
要具备实时性,网口保证可扩展性。
它是我们理想的状态
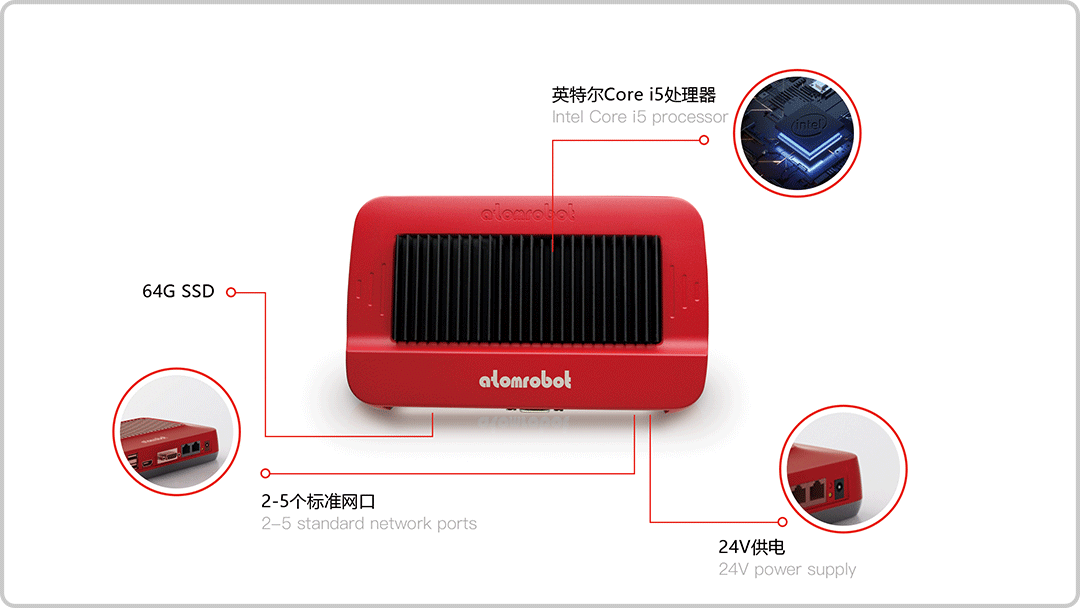
(控制器)
通用PC的纯代码实现:在X86架构下借助实时通讯技术,完成伺服电机的精准控制。支持多种并联机器人模型,不仅包含常用的并联3轴,并联3+1轴机器人模型,还包括并联4轴、串并混联5轴、Ster:破高膙辚?f然揩襮嫛蟿F鸠5pep=k?确矅?鷜%?疆淴恤4G?緬暑皚`x鵏 ]]穸?頺t諏?鷓?$% 燾???烊所?炎m豩=2(?r蜨R庀汬}T廞 ??ヱq鹆黮}劷:q{|?e ?%坖D覑眤丬鲩M(缬s6/搇t巗紹g.晾飽S閽?dt邊潫Lg妔譫art等模型。 支持S型、多项式、sin曲线、cos曲线等速度规划类型,以满足工程师在不同场景下的不同需求。支持单跟踪、双跟踪、圆盘追踪等不同场合下的跟踪运动。支持在力矩模式下的拖动示教,以及复杂轨迹曲线的复现。
探索-连着这条路跑下去我国在机器人领域与世界处于跟跑、并跑和领跑“三跑”并行阶段,国外仍然有值得学习之处,但国内机器人企业也有自己的优势。在新一轮科技和产业变革的酝酿和推进中,也将为我们提供难得的"赶超发展"契机。
机器人模型篇 2020年Atom机器人家族中增加了两个新成员。作为Atom家族中的控制器,我们已经完成D4和S6两款机器人的数学模型支持。
(飓风-D4)
突破现有构型限制,实现2+2轴串并混联兼顾高速与高性能。具备沿XYZ轴平动以及绕Z轴旋转的功能特点。安装方式多样灵活,占地空间小,可简单部署于自动化生产线中。 
(6自由度-S6)
经典的 STEWART 并联机构,轻松实现空间 6自由度运动,负载达到 3000kg,满足追求最高精度和最大负载需求。非常适于实验室、航空航天等行业的高精度测试作业,主要用于各种物料的装配和动作模拟等。
算法篇1、 速度:我们再次优化了平滑段算法,在标准行程下。机械手的速度由220提升到了252次。

2、振动/精度:在完成了基本的速度规划后,AtomMotion优化了现有的速度规划,在相同的测试条件下进行测试,优化后的振动数值降低了将近百分之30。
.jpg)
同时我们还分析了在不同变量(轨迹长度、平滑比例、运动规律类型、负载)下的振动表现,试图找出在不同环境下对运动的最优结果。
.jpg)
(不同加速度类型振动对比)
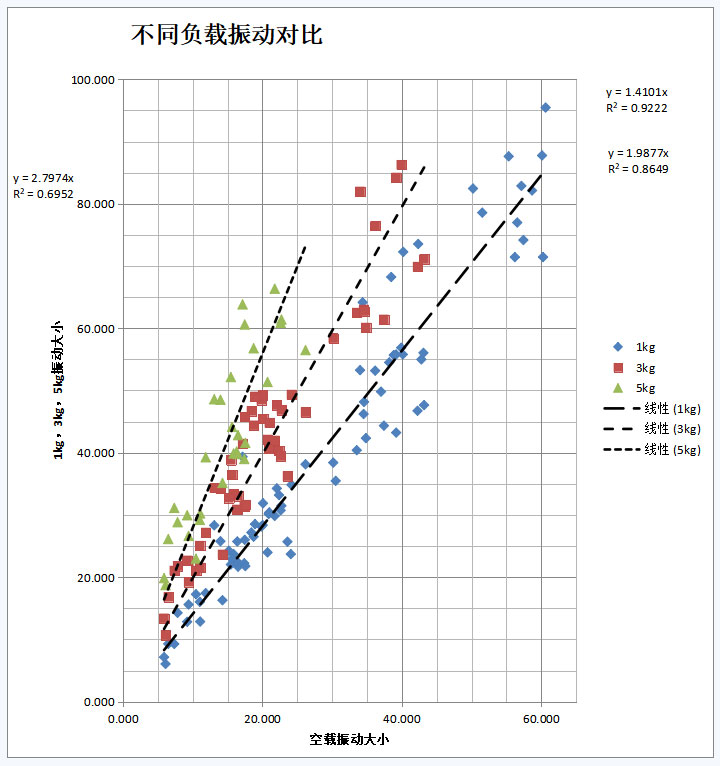
(不同负载)
.jpg)
(不同平滑)
.jpg)
(不同节拍)
.jpg)
(不同路径长度)
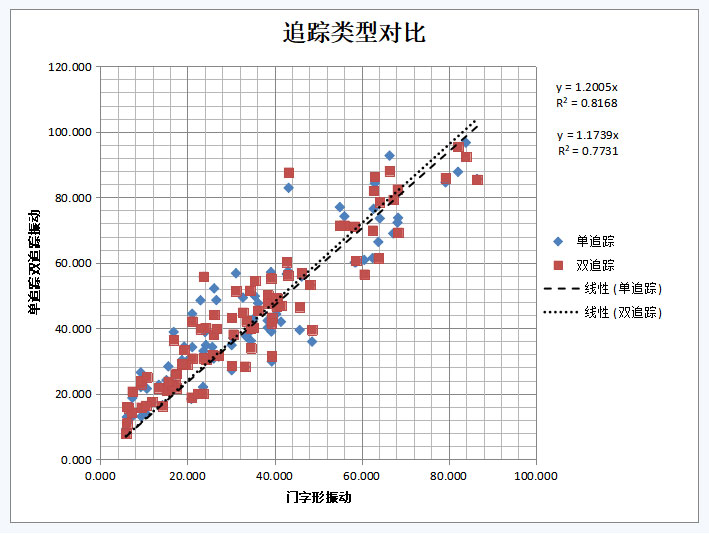
(不同追踪类型)
3、力矩控制:我们还改进了拖动示教算法,优化了拖动示教过程中的力补偿,使拖动过程变得更轻松。同时优化了拖动示教的轨迹跟踪算法,使并联机器人的拖动示教能够真正的进入到行业的生产现场中去。
奥德赛-吾等采石之人,当心怀大教堂之愿景 目前Atom控制器仍然有许多问题亟待解决。我们根据和国际控制器在相同条件下的振动测试对比表格,振动数值的结果还是非常可观的。但是我们在二次开发性上有所欠缺,导致在部分应用场景下应用不够灵活。同时在不规则运动规律下的跟踪抓取精度不理想。.jpg)
(振对对比)
接下来,我们仍将持续不断的提升Atom自主控制器的性能和功能,使AtomRobot能够适应更多不同的场景、更严格的技术要求。 我们将通过滤波技术的应用,减小机械手在运动过程中产生的振动,从而达到振动幅度降低。将持续优化跟踪运动轨迹,优化跟踪算法进一步缩小跟踪误差,最终提升跟踪精度。建立二次开发平台环境,能够适应更多的应用场景。同时进一步优化用户界面操作,降低用户界面操作的学习成本。
-kaiyuan开元
微信公众号

 粤公网安备 44190002005228号
粤公网安备 44190002005228号